uvsim Namespace Reference
Classes | |
| class | HUDView |
| HUDView Class. More... | |
| class | MainWindow |
| MainWindow Class. More... | |
| class | MapArea |
| MapArea Class. More... | |
| class | ThreeDView |
| ThreeDView Class. More... | |
| union | checksum |
| class | ControlComm |
| class | Controller |
| class | ServoController |
| class | AhrsErrorDynamics |
| class | LinearModel |
| Linear Model Class. More... | |
| class | Model |
| class | FlightPlan |
| FlightPlan Class. More... | |
| class | GeoCoord |
| GeoCoord Class. More... | |
| class | Guide |
| Guide class. More... | |
| class | ExtendedKalmanFilter |
| Extended Kalman Filter Class. More... | |
| class | GeoMag |
| class | Ins |
| class | KalmanFilter |
| Kalman Filter Class. More... | |
| class | Navigator |
| class | Camera |
| The camera class implements and opencv camera. More... | |
| class | DepthEngine |
| class | Imu6DofSensor |
| class | Sensor |
| The sensor class defines the interface for all of the sensors. More... | |
| class | StereoEngine |
| class | VisionThread |
| class | ControlThread |
| class | NavigationThread |
| class | UgvSystem |
| class | RealtimeThread |
| class | Ellipsoid |
| class | FrameCallback |
| class | Frame |
| class | PointCloudCallback |
| class | PointCloud |
| class | SimpleViewer |
Typedefs | |
| typedef std::vector < osg::ref_ptr< osg::Image > > | ImageList |
Enumerations | |
| enum | ControlMode { AUTO, MANUAL } |
Functions | |
| std::ostream & | operator<< (std::ostream &out, FlightPlan &flightPlan) |
| std::ostream & | operator<< (std::ostream &out, GeoCoord &geoCoord) |
| void * | runViewerThread (void *ptr) |
| template<class T > | |
| bool | InvertMatrix (const matrix< T > &input, matrix< T > &inverse) |
| bool | fileExists (const char *filename) |
| std::string | doubleToString (double val) |
| std::string | intToString (int val) |
| static bool | console_initialize_terminfo () |
| void | cursorxy (int col, int line) |
| void | clear (bool gohome) |
| void | lowPass (const double &freq, const vector< double > &freqCut, const vector< double > &x, vector< double > &y) |
| matrix< double > | ones (int m, int n) |
| matrix< double > | skew (vector< double > &v) |
| double | max (vector< double > v) |
| matrix< double > | inv (const matrix< double > &input) |
| Matrix inversion routine. | |
| matrix< double > | pinv (matrix< double > A) |
| bool | select (double real, double imag) |
| matrix< double > | dare (matrix< double > A, matrix< double > B, matrix< double > R, matrix< double >Q) |
| matrix< double > | prod (matrix< double > A, matrix< double > B, matrix< double > C) |
| void | discretize (matrix< double > &Ac, matrix< double > &Bc, matrix< double > &Ad, matrix< double > &Bd, double T, int order) |
| vector< double > | integrate (vector< double > i1, vector< double > i0, vector< double > initial, double freq) |
| double | integrate (double i1, double i0, double initial, double freq) |
| double | elapsedTime (timeval time0, timeval time) |
| vector< double > | quatProd (vector< double > q1, vector< double > q2) |
| vector< double > | quatRotate (vector< double > q, vector< double > vec) |
| vector< double > | crossProd (vector< double > v1, vector< double > v2) |
| vector< double > | quatConj (vector< double > q) |
| vector< double > | quat2Euler (vector< double > q) |
| vector< double > | euler2Quat (vector< double > euler) |
| vector< double > | axisAngle2Quat (vector< double > axis, double angle) |
| vector< double > | norm (vector< double > vec) |
| vector< double > | dotProd (vector< double > v1, vector< double > v2) |
Variables | |
| int | keyDown |
| int | setCounter = 0 |
| int | orderCounter = 0 |
| static const char | m_msgHeader = 'A' |
| static const char | m_msgFooter = 'Z' |
| static const char * | joystickCalibration = "/usr/local/share/uvsim/joystick" |
| static const char | exitMenuCmd = '9' |
| static const char | stopCmd = ' ' |
| static const char | startCmd = '#' |
| static const double | R0 = 6371000 |
| static const double | omega = 7.29211e-5 |
| static const double | g = 9.81 |
| static const double | PI = 3.1415926535897932384626433832795 |
| static const int | byteRange = 1024 |
| static const double | gRange = 2.0 |
| static const double | acellMax = gRange * g |
| static const double | rollMax = 500 * PI/180 |
| static char * | console_clearscreen = 0 |
| static char * | console_cursorposition = 0 |
Typedef Documentation
| typedef std::vector< osg::ref_ptr<osg::Image> > uvsim::ImageList |
Enumeration Type Documentation
| enum uvsim::ControlMode |
Definition at line 30 of file UgvSystem.h.
Function Documentation
| vector< double > uvsim::axisAngle2Quat | ( | vector< double > | axis, | |
| double | angle | |||
| ) |

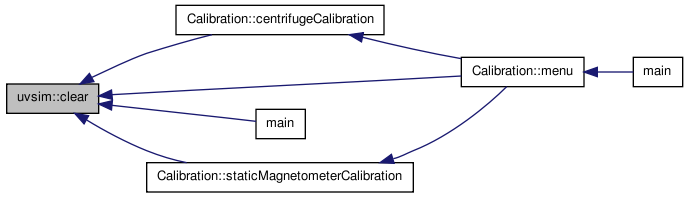
| void uvsim::clear | ( | bool | gohome | ) |
| static bool uvsim::console_initialize_terminfo | ( | ) | [static] |
Definition at line 53 of file utilities.cc.
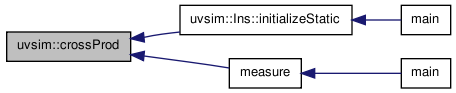
| vector< double > uvsim::crossProd | ( | vector< double > | v1, | |
| vector< double > | v2 | |||
| ) |
| void uvsim::cursorxy | ( | int | col, | |
| int | line | |||
| ) |
| matrix< double > uvsim::dare | ( | matrix< double > | A, | |
| matrix< double > | B, | |||
| matrix< double > | R, | |||
| matrix< double > | Q | |||
| ) |
| void uvsim::discretize | ( | matrix< double > & | Ac, | |
| matrix< double > & | Bc, | |||
| matrix< double > & | Ad, | |||
| matrix< double > & | Bd, | |||
| double | T, | |||
| int | order | |||
| ) |

| vector<double> uvsim::dotProd | ( | vector< double > | v1, | |
| vector< double > | v2 | |||
| ) |
| std::string uvsim::doubleToString | ( | double | val | ) |

| double uvsim::elapsedTime | ( | timeval | time0, | |
| timeval | time | |||
| ) |

| vector< double > uvsim::euler2Quat | ( | vector< double > | euler | ) |

| bool uvsim::fileExists | ( | const char * | filename | ) |

| double uvsim::integrate | ( | double | i1, | |
| double | i0, | |||
| double | initial, | |||
| double | freq | |||
| ) |
| vector< double > uvsim::integrate | ( | vector< double > | i1, | |
| vector< double > | i0, | |||
| vector< double > | initial, | |||
| double | freq | |||
| ) |

| std::string uvsim::intToString | ( | int | val | ) |

| matrix< double > uvsim::inv | ( | const matrix< double > & | input | ) |
Matrix inversion routine.
Uses lu_factorize and lu_substitute in uBLAS to invert a matrix

| bool uvsim::InvertMatrix | ( | const matrix< T > & | input, | |
| matrix< T > & | inverse | |||
| ) | [inline] |
Definition at line 26 of file InvertMatrix.h.
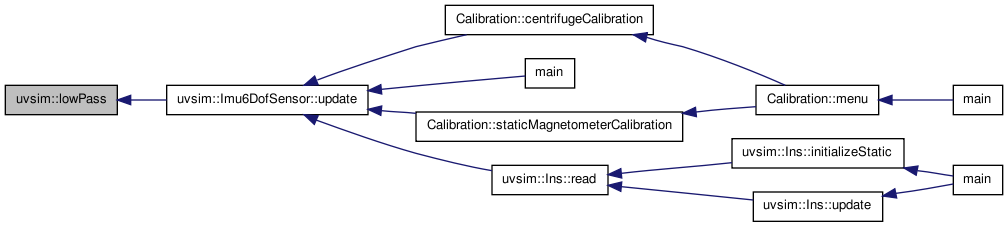
| void uvsim::lowPass | ( | const double & | freq, | |
| const vector< double > & | freqCut, | |||
| const vector< double > & | x, | |||
| vector< double > & | y | |||
| ) |
| double uvsim::max | ( | vector< double > | v | ) |
| vector< double > uvsim::norm | ( | vector< double > | vec | ) |

| matrix< double > uvsim::ones | ( | int | m, | |
| int | n | |||
| ) |

| std::ostream& uvsim::operator<< | ( | std::ostream & | out, | |
| GeoCoord & | geoCoord | |||
| ) |
Definition at line 49 of file GeoCoord.cc.
| std::ostream& uvsim::operator<< | ( | std::ostream & | out, | |
| FlightPlan & | flightPlan | |||
| ) |
Definition at line 119 of file FlightPlan.cc.
| matrix< double > uvsim::pinv | ( | matrix< double > | A | ) |
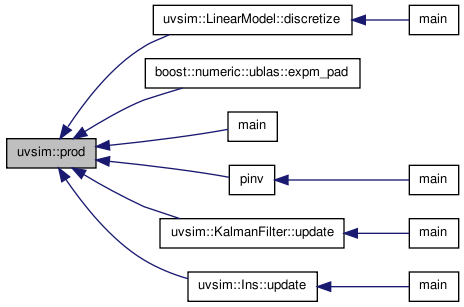
| matrix< double > uvsim::prod | ( | matrix< double > | A, | |
| matrix< double > | B, | |||
| matrix< double > | C | |||
| ) |
| vector< double > uvsim::quat2Euler | ( | vector< double > | q | ) |
| vector< double > uvsim::quatConj | ( | vector< double > | q | ) |
| vector< double > uvsim::quatProd | ( | vector< double > | q1, | |
| vector< double > | q2 | |||
| ) |
| vector< double > uvsim::quatRotate | ( | vector< double > | q, | |
| vector< double > | vec | |||
| ) |

| void* uvsim::runViewerThread | ( | void * | ptr | ) |
Definition at line 487 of file StereoEngine.cc.
| bool uvsim::select | ( | double | real, | |
| double | imag | |||
| ) |
| matrix< double > uvsim::skew | ( | vector< double > & | v | ) |

Variable Documentation
const double uvsim::acellMax = gRange * g [static] |
Definition at line 19 of file constants.h.
const int uvsim::byteRange = 1024 [static] |
Definition at line 17 of file constants.h.
char* uvsim::console_clearscreen = 0 [static] |
Definition at line 50 of file utilities.cc.
char* uvsim::console_cursorposition = 0 [static] |
Definition at line 51 of file utilities.cc.
const char uvsim::exitMenuCmd = '9' [static] |
Definition at line 34 of file Imu6DofSensor.h.
const double uvsim::g = 9.81 [static] |
Definition at line 15 of file constants.h.
const double uvsim::gRange = 2.0 [static] |
Definition at line 18 of file constants.h.
const char* uvsim::joystickCalibration = "/usr/local/share/uvsim/joystick" [static] |
Definition at line 22 of file ControlComm.h.
| int uvsim::keyDown |
Definition at line 30 of file MainWindow.cc.
const char uvsim::m_msgFooter = 'Z' [static] |
Definition at line 21 of file ControlComm.h.
const char uvsim::m_msgHeader = 'A' [static] |
Definition at line 20 of file ControlComm.h.
const double uvsim::omega = 7.29211e-5 [static] |
Definition at line 14 of file constants.h.
| int uvsim::orderCounter = 0 |
Definition at line 32 of file MainWindow.cc.
const double uvsim::PI = 3.1415926535897932384626433832795 [static] |
Definition at line 16 of file constants.h.
const double uvsim::R0 = 6371000 [static] |
Definition at line 13 of file constants.h.
const double uvsim::rollMax = 500 * PI/180 [static] |
Definition at line 20 of file constants.h.
| int uvsim::setCounter = 0 |
Definition at line 31 of file MainWindow.cc.
const char uvsim::startCmd = '#' [static] |
Definition at line 36 of file Imu6DofSensor.h.
const char uvsim::stopCmd = ' ' [static] |
Definition at line 35 of file Imu6DofSensor.h.
